SPI 协议
SPI 协议简介
SPI(Serial Peripheral Interface)是一种同步的串行通信协议,由 Motorola 公司在 1980 年代提出,用于芯片间通信。SPI 协议是一种主从式的通信协议,主设备可以同时控制多个从设备,但每个从设备只能被一个主设备控制。SPI 协议的主要特点是通信速度快,但通信线路较多,常用于短距离的板内通信。
SPI 通信必须由主机发起通信(无论是发送还是接收),从机被动接受。从机不能主动发送数据。
SPI 接口形式
SPI 接口有如下几个引脚:
- SCLK(Serial Clock):时钟信号
- MOSI(Master Output / Slave Input):主设备输出、从设备输入
- MISO(Master Input / Slave Output):主设备输入、从设备输出
- CS(Chip Select):片选信号,用于选择从设备
此处只讨论标准 SPI,不讨论 Dual SPI、Qual SPI 等扩展协议。
SPI 时序
片选信号
SPI 传输过程中,输出 CS 为低电平,选择从设备。从设备只有在 CS 为低电平时,才会响应主设备的时钟信号。
在多个从设备的情况下,可以使用多个 CS 引脚,每个 CS 引脚对应一个从设备。在每次传输开始前,主设备需要先拉低对应的 CS 引脚,然后再传输数据。传输结束后,主设备需要拉高对应的 CS 引脚,释放从设备。
在单个从设备的情况下,可以直接将从设备的 CS 引脚接地,省去了主设备控制 CS 引脚的步骤。也可以使用硬件 NSS 信号作为从设备的 CS 引脚。
协议参数
SPI 协议的主要参数有:
- 时钟极性(CPOL,Clock Polarity):时钟空闲状态为高电平还是低电平
- 时钟相位(CPHA,Clock Phase):数据在时钟的第一个边沿采样还是第二个边沿采样
- 时钟频率(SCLK,Serial Clock):时钟信号的频率
- 传输顺序:MSB 优先还是 LSB 优先
SPI 时序实例
MSB 优先,SPI Mode 0(CPOL=0,CPHA=0)
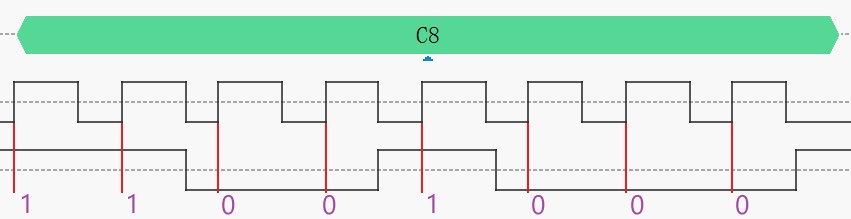
时钟信号
SPI 时钟信号由主设备产生,从设备被动接收。时钟信号仅在传输数据时使用,空闲状态会维持在高电平或低电平(由时钟极性决定)。
CPOL=0 时,时钟空闲状态为低电平;CPOL=1 时,时钟空闲状态为高电平。
数据信号
数据信号在时钟信号的边沿采样,具体第一边沿还是第二边沿由时钟相位决定。
CPHA=0 时,数据在时钟的第一个边沿采样;CPHA=1 时,数据在时钟的第二个边沿采样。
数据的比特序分为 MSB 优先 和 LSB 优先两种,双方需要提前约定。
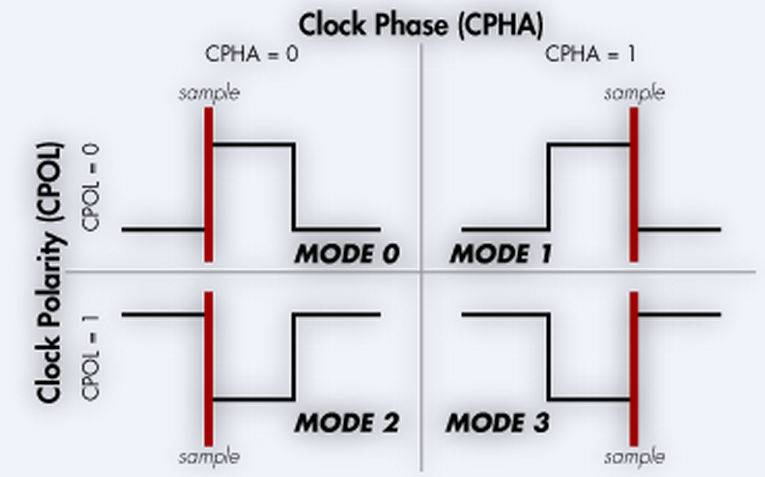
SPI 模式
SPI 模式号是 CPOL 和 CPHA 的组合,一共有四种模式:
- Mode \(0=(00)_2\):CPOL=0,CPHA=0
- Mode \(1=(01)_2\):CPOL=0,CPHA=1
- Mode \(2=(10)_2\):CPOL=1,CPHA=0
- Mode \(3=(11)_2\):CPOL=1,CPHA=1
HAL 库中的 SPI 使用方法(主机)
1 2 3 4 5 6 7 | |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | |
1 2 3 4 5 6 7 8 9 10 11 12 | |