定时器基本用法
一切定时器本质都是计数器。单片机的定时器接收一个稳定的时钟信号,并基于此信号进行计数,达到定时的效果。
时钟源
定时器的时钟源多种多样,可以来源于单片机内部的时钟,也可以来源于单独的时钟信号,还可以来源于另一个定时器(定时器与定时器串联),最简单的用法自然是使用单片机内部时钟 Internal Clock(APBx 总线时钟)。
根据定时器的不同,其内部时钟可能来源于 APB1 或 APB2。以 STM32F4xx 系列为例,TIM1 的内部时钟来源于 APB1,其他定时器的内部时钟来源于 APB2。
分频
通常而言,时钟源信号的频率极高且较为固定,在很多情景下并不方便。故而,每个定时器都配备了自己的分频器,以分频的形式获取合适的计数频率。
分配器的分频值由 PSC 寄存器决定,其值为分频值减 1。例如:若 PSC 寄存器的值为 83,则表示 /84 分频。
注意
计数频率不代表定时器输出的 PWM 波的频率(如果工作在 PWM Generation 模式),更不代表 UPDATE 事件触发频率
自动重装载
定时器的“计数”范围是限定的,当数值过大超出这个范围时,就需要进行“重置”,重装载值就描述了这个范围限度。
自动重装载值由 ARR 寄存器决定。
计数模式
定时器存在三者基本的计数模式:
向上计数模式(Up)
当被时钟信号触发周期性“计数”事件时,若当前计数值(CNT)已经等于自动重装载值(ARR),则重置为 0 并触发 UPDATE 事件;否则,使计数值加 1。
向下计数模式(Down)
当被时钟信号触发周期性“计数”事件时,若当前计数值(CNT)已经等于 0,则重置为自动重装载值(ARR)并触发 UPDATE 事件;否则,使计数值减 1。
中心对称计数模式(Center-aligned)
在中心对称计数模式下,计数器首先从 0 计数到 ARR-1,然后从 ARR 计数并产生 UPDATE 事件,直到递减到 1,然后回到 0 开始下个周期并触发 UPDATE 事件。
在 CubeMX 配置定时器基本参数
在 CubeMX 中,我们可以这样配置定时器的基本参数:
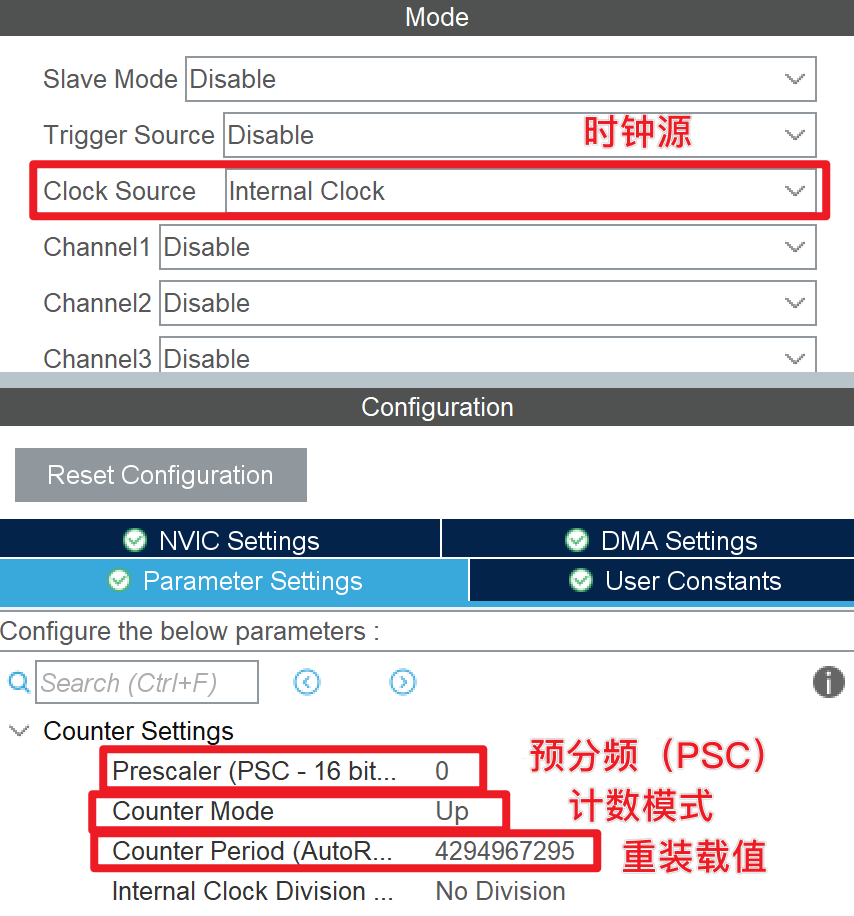
注意:有些定时器的时钟源仅有内部时钟(Internal Clock),此时只有一个复选框,打勾即可。
使用 HAL 库操作定时器
在使用定时器时,我们必须先启动定时器,以便开始计数。在 HAL 库中,我们可以使用以下代码启动定时器:
1 | |
我们可以使用 HAL 库来读取定时器的各种信息,例如:
1 2 3 4 5 6 | |
也可以动态修改定时器的各种信息,例如:
1 2 3 4 5 6 | |
UPDATE 中断
通过配置,我们可以使得 UPDATE 事件发生时产生一个中断,以便周期性地执行某些代码。
以向上计数模式(这是最常用的模式)为例,我们可以根据上文描述算出 UPDATE 中断的触发频率为: $$ f_{\text{update}}=\frac{f_{\text{in}}}{\text{PSC}+1}\times\frac{1}{\text{ARR}+1} $$
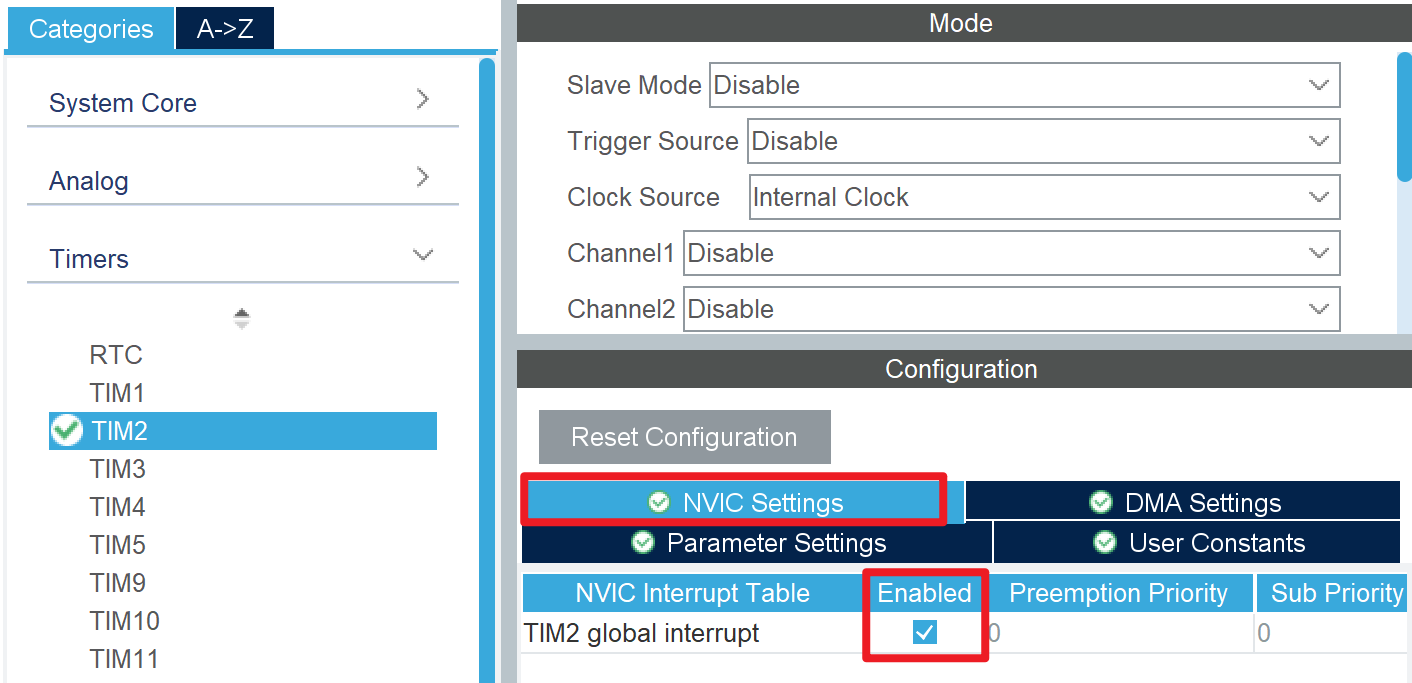
在 CubeMX 中,我们可以这样开启中断:
在 HAL 库代码中,我们需要使用以下代码启动定时器并使能中断:
1 2 | |
通过 HAL 库的以下回调函数响应中断:
1 2 3 4 5 6 | |